

产品中心

自主定位导航:采用惯性导航、视觉导航等技术实现精确定位。
柔性运动控制:采用双轮差速驱动,支持前进、后退、旋转等运动控制,运动过程平滑柔顺。
智能电源管理:支持多等级电量阀值控制,低电量时自主充电,完成充电后自主返回工作。
多重安全防护:前置摄像头+激光,支持前远距离检测,前近距离检测,前/后双层碰撞检测,前/后急停按钮等多级安全防护,实现安全可靠的运动控制。
人机交互友好:支持液晶显示屏、声音告警提示。
大型货物搬运:支持600kg货物举升、搬运、旋转、下放。
设备状态指示:通过声音提示、状态指示灯,提示设备状态。
无线网络通信:支持WIFI网络通信和无缝漫游,网络覆盖区域无障碍运行。
MR-Q3-600CE-C1(H)
自主定位导航,采用惯性导航、视觉导航(二维码导航/VSLAM)、SLAM 导航(激光开角:270°)等技术实现精确定位。
柔性运动控制,采用双轮差速驱动,支持前进、后退、旋转等运动控制,运动过程平滑柔顺。
智能电源管理,支持多等级电量阀值控制,低电量时自主充电,完成充电后自主返回工作。
多重安全防护,前置激光避障,后置超声避障,前/后碰撞检测,前/后急停按钮等多级安全防护,实现安全可靠的运动控制。
人机交互友好,支持显示屏、声音告警、状态指示灯。
中型货物搬运,支持300kg 货物举升、搬运、旋转、下放。
设备状态指示,通过状态指示灯,提示设备状态等。
无线网络通信,支持 WIFI 网络通信和无缝漫游,网络覆盖区域无障碍运行。
MR-Q2L-300LE-A1(H)


自主定位导航,采用惯性导航、视觉导航等技术实现精确定位。
柔性运动控制,采用双轮差速驱动,运动过程平滑柔顺。
智能电源管理,支持多等级电量阀值控制,低电量时自主充电,完成充电后自主返回工作。
多重安全防护,支持激光避障,远/近距离检测,前/后碰撞条检测,前/后急停按钮,声音告警等多级安全防护,实现安全可靠的运动控制。
支持销孔对接、支持货架对接失败检测报警。
大型货物搬运,支持最大400kg货物举升、搬运、下放。
设备状态指示,通过状态指示灯、数码管,提示电量、设备状态等。
无线网络通信,支持WIFI 网络通信和无缝漫游,网络覆盖区域无障碍运行。
MR-Q3-400CH-B1(SN)

| RS003N的规格 | |||
| 手臂类型 | 多关节型机器人 | ||
|---|---|---|---|
| 自由度 (轴) | 6 | ||
| 最大负载能力 (kg) | 3 | ||
| 最大臂展 (mm) | 620 | ||
| 重复定位精度 (mm) ✽1 | ±0.02 | ||
| 动作范围 (°) | 手臂旋转 (JT1) | ±160 | |
| 手臂前后 (JT2) | +150 - −60 | ||
| 手臂上下 (JT3) | +120 - −150 | ||
| 手腕旋转 (JT4) | ±360 | ||
| 手腕弯曲 (JT5) | ±135 | ||
| 手腕扭转 (JT6) | ±360 | ||
| 最大速度 (°/s) | 手臂旋转 (JT1) | 360 | |
| 手臂前后 (JT2) | 250 | ||
| 手臂上下 (JT3) | 225 | ||
| 手腕旋转 (JT4) | 540 | ||
| 手腕弯曲 (JT5) | 225 | ||
| 手腕扭转 (JT6) | 540 | ||
| 允许负载扭矩 (N•m) | 手腕旋转 (JT4) | 5.8 | |
| 手腕弯曲 (JT5) | 5.8 | ||
| 手腕扭转 (JT6) | 2.9 | ||
| 允许负载惯量 (kg•m2) | 手腕旋转 (JT4) | 0.12 | |
| 手腕弯曲 (JT5) | 0.12 | ||
| 手腕扭转 (JT6) | 0.03 | ||
| 重量 (kg) | 20 | ||
| 安装方式 | 地面, 悬挂 | ||
| 安装条件 | 环境温度 (°C) | 0 - 45 | |
| 相对湿度 (%) | 35 - 85 (无结露) | ||
| 控制柜 / 所需电源 (kVA) |
F60 / 2.0 | ||
| 保护等级 | IP54同等 | ||
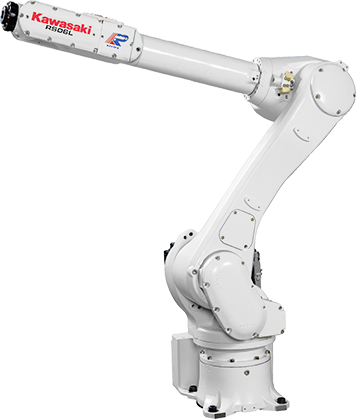
| RS006L的规格 | |||
| 手臂类型 | 多关节型机器人 | ||
|---|---|---|---|
| 自由度 (轴) | 6 | ||
| 最大负载能力 (kg) | 6 | ||
| 最大臂展 (mm) | 1,650 | ||
| 重复定位精度 (mm)✽1 | ±0.03 | ||
| 动作范围 (°) | 手臂旋转 (JT1) | ±180 | |
| 手臂前后 (JT2) | +145 - −105 | ||
| 手臂上下 (JT3) | +150 - −163 | ||
| 手腕旋转 (JT4) | ±270 | ||
| 手腕弯曲 (JT5) | ±145 | ||
| 手腕扭转 (JT6) | ±360 | ||
| 最大速度 (°/s) | 手臂旋转 (JT1) | 250 | |
| 手臂前后 (JT2) | 250 | ||
| 手臂上下 (JT3) | 215 | ||
| 手腕旋转 (JT4) | 365 | ||
| 手腕弯曲 (JT5) | 380 | ||
| 手腕扭转 (JT6) | 700 | ||
| 允许负载扭矩 (N•m) | 手腕旋转 (JT4) | 13 | |
| 手腕弯曲 (JT5) | 13 | ||
| 手腕扭转 (JT6) | 7.5 | ||
| 允许负载惯量 (kg•m2) | 手腕旋转 (JT4) | 0.45 | |
| 手腕弯曲 (JT5) | 0.45 | ||
| 手腕扭转 (JT6) | 0.14 | ||
| 重量 (kg) | 150 | ||
| 安装方式 | 地面, 悬挂 | ||
| 安装条件 | 环境温度 (°C) | 0 - 45 | |
| 相对湿度 (%) | 35 - 85 (无结露) | ||
| 控制柜 / 所需电源 (kVA) |
F60 / 1.0 | ||
| 保护等级 | 手腕: IP67同等 基座: IP65同等 | ||

| BA006N的规格 | |||
| 手臂类型 | 多关节型机器人 | ||
|---|---|---|---|
| 自由度 | 6 | ||
| 最大负载能力 (kg) | 6 | ||
| 最大臂展 (mm) | 1,445 | ||
| 重复定位精度 (mm) ✽1 | ±0.06 | ||
| 动作范围 (°) | 手臂旋转 (JT1) | ±165 | |
| 手臂前后 (JT2) | +150 - −90 | ||
| 手臂上下 (JT3) | +90 - −175 | ||
| 手腕旋转 (JT4) | ±180 | ||
| 手腕弯曲 (JT5) | ±135 | ||
| 手腕扭转 (JT6) | ±360 | ||
| 最大速度 (°/s) | 手臂旋转 (JT1) | 240 | |
| 手臂前后 (JT2) | 240 | ||
| 手臂上下 (JT3) | 220 | ||
| 手腕旋转 (JT4) | 430 | ||
| 手腕弯曲 (JT5) | 430 | ||
| 手腕扭转 (JT6) | 650 | ||
| 允许负载扭矩 (N•m) | 手腕旋转 (JT4) | 12 | |
| 手腕弯曲 (JT5) | 12 | ||
| 手腕扭转 (JT6) | 3.75 | ||
| 允许负载惯量 (kg•m2) | 手腕旋转 (JT4) | 0.4 | |
| 手腕弯曲 (JT5) | 0.4 | ||
| 手腕扭转 (JT6) | 0.07 | ||
| 重量 (kg) | 150 | ||
| 安装方式 | 地面, 悬挂 | ||
| 安装条件 | 环境温度 (°C) | 0 - 45 | |
| 相对湿度 (%) | 35 - 85 (无结露) | ||
| 控制柜 / 所需电源 (kVA) | 型号 面向北美 | E01 / 5.6 | |
| 型号 面向欧洲 | |||
| 型号 面向日本 & 亚洲 | |||

| BT200L的规格 | |||
| 手臂类型 | 多关节型机器人 | ||
|---|---|---|---|
| 自由度 (轴) | 6 | ||
| 最大负载能力 (kg) | 200 | ||
| 最大臂展 (mm) | 3,151 | ||
| 重复定位精度 (mm)✽1 | ±0.08 | ||
| 动作范围 (°) | 手臂旋转 (JT1) | ±160 | |
| 手臂前后 (JT2) | +80 - -130 | ||
| 手臂上下 (JT3) | +90 - -75 | ||
| 手腕旋转 (JT4) | ±210 | ||
| 手腕弯曲 (JT5) | ±125 | ||
| 手腕扭转 (JT6) | ±210 | ||
| 最大速度 (°/s) | 手臂旋转 (JT1) | 105 | |
| 手臂前后 (JT2) | 85 | ||
| 手臂上下 (JT3) | 100 | ||
| 手腕旋转 (JT4) | 120 | ||
| 手腕弯曲 (JT5) | 120 | ||
| 手腕扭转 (JT6) | 200 | ||
| 允许负载扭矩 (N•m) | 手腕旋转 (JT4) | 1,334 | |
| 手腕弯曲 (JT5) | 1,334 | ||
| 手腕扭转 (JT6) | 588 | ||
| 允许负载惯量 (kg•m2) | 手腕旋转 (JT4) | 199.8 | |
| 手腕弯曲 (JT5) | 199.8 | ||
| 手腕扭转 (JT6) | 154.9 | ||
| 重量 (kg) | 1,100 | ||
| 安装方式 | 支架 | ||
| 安装条件 | 环境温度 (°C) | 0 - 45 | |
| 相对湿度 (%) | 35 - 85 (无结露) | ||
| 控制柜 / 所需电源 (kVA) |
E02 / 7.5 | ||
| 保护等级 | 手腕 : IP67同等 基座 : IP54同等 | ||